

智能机器人实验室配备了服务机械人平台、机器人应用系统开放平台、智能机械臂、无人机等多项设备,该实验室致力于开展智能机器人的教学实验和应用研究,以适应当前国家经济智能化、数字化转型的趋势,推动我国先进机器人技术与系统的可持续发展。

通过该实验室的资源和设备,学生能够在智能机器人领域实现创新应用开发,涉及人机协作、自主导航和环境感知等关键领域。利用可编程的Pepper人形机器人综合平台,他们可以开发拥有人形设计和交互能力的机器人应用,如商业服务和教育辅助。同时,利用UR机械臂的编程能力,他们能够实现工具移动和与其他机器人进行通信,为制造业等行业提供创新解决方案。这些创新将推动智能化社会的发展,培养学生的技术能力和创新思维,并为未来的就业和创业提供更广阔的发展空间。
完全可编程的Pepper人形机器人综合平台
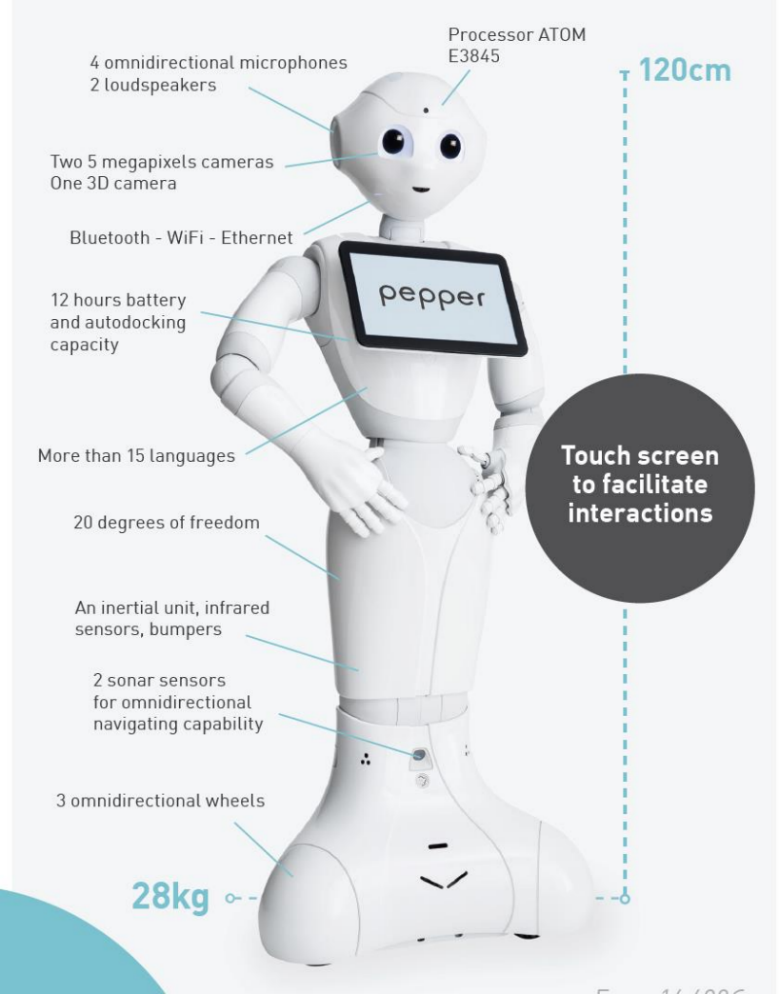
该机器人配备多个传感器,可以用于多种功能和应用,通过传感器的数据获取和处理,机器人能够感知和理解周围环境,从而完成相应的任务和交互。
触摸传感器能够感知和检测物体的接触或触碰,实现人机交互和触摸输入功能。
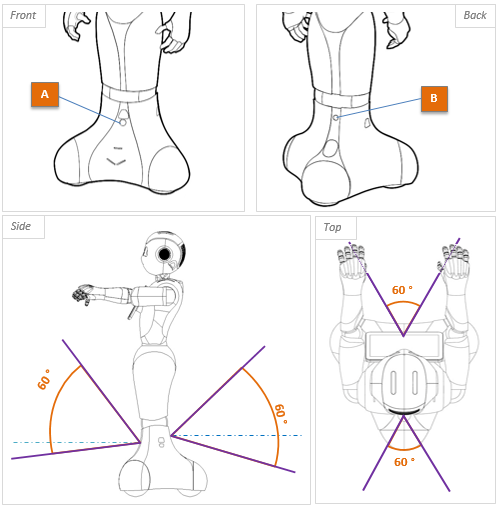
麦克风和红外传感器

麦克风用于接收声音信号,实现语音交互和声音识别功能;红外传感器用于探测和测量红外线辐射,实现距离测量、障碍物检测和环境感知等应用。
加速度与运动传感器
加速度与运动传感器用于检测和测量机器人的加速度、姿态和运动状态,实现导航、姿态控制和动作识别等功能。
碰撞与声呐传感器
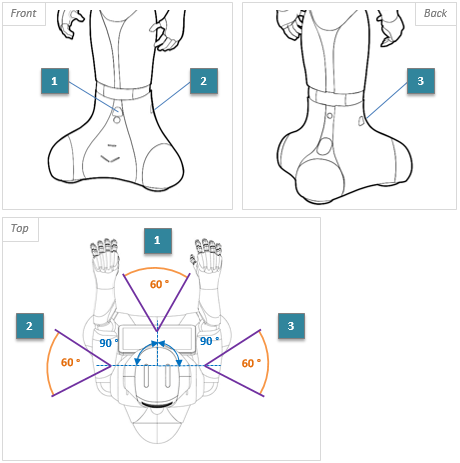
碰撞与声呐传感器用于检测和识别障碍物、避免碰撞,并提供环境感知和避障功能。
Pepper机器人通过监视其内部传感器数据,使用Choregraph进行可视化编程,并建立了综合的C++或Python API。这使得Pepper具备了SLAM(Simultaneous Localization and Mapping,同时定位与建图)、导航、物体识别、人脸识别、语音识别等功能,使其在智能机器人等领域具有广泛的应用前景。
UR机械臂
UR5e机械臂具备通过编程实现工具移动和与其他机器进行通信的能力,用户可以使用PolyScope编程界面轻松对机器人进行编程,使其装载的工具按照所需的轨迹移动。

编程用户界面


UR5e通过协作创新、以人为中心的用户体验(UX)以及适用于各种应用的生态系统为不断发展的用户提供支持。PolyScope专利技术使得即使对编程没有经验的操作人员也能快速设置和操作这个直观的、具备3D可视化的协作式机器人。只需将机器人手臂移动到所需位置,或者通过触摸方便易用的触屏平板电脑上的下箭头键即可实现操作。
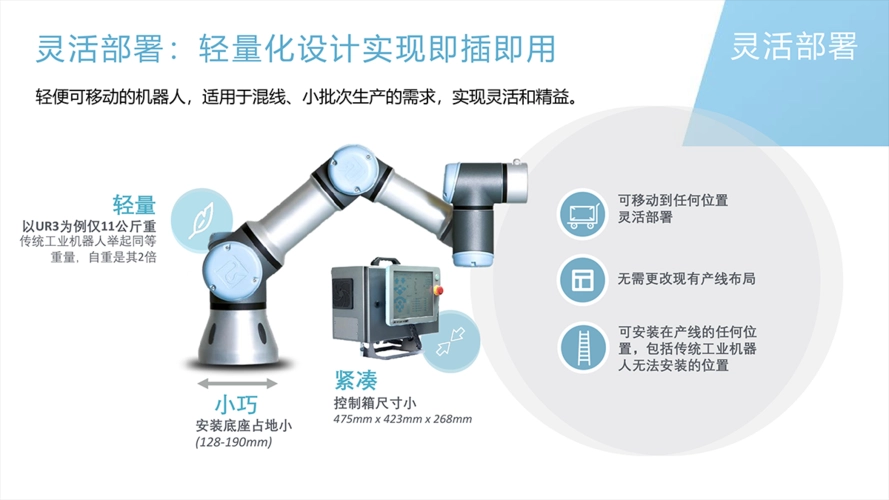
UR5e机械臂轻巧、节省空间、易于重新部署在多个应用程序中,而不会改变生产布局。协作式机器人能被十分便捷地移至新的流程中,并能灵活、自动地处理几乎任何手动作业。
大疆御3无人机
随着无人机技术的成熟,利用无人机可以完成很多高难度、高危险系数的任务,如高空拍照、物流配送、灾害探测,搜索与救援等。

大疆御3的主要优点:
(1)采用智能跟随5.0系统,在地势复杂的环境下也能准确区分主体和其他目标,并对主体运动和环境信息做出预判,提前规划更合理跟随轨迹。
(2)Mavic3的机身整体和桨叶都进行了动力学优化,风阻系数也相比上代减少了35%。充电功率提升到了65W,充电速度快、散热声音小。
(3)支持手机快传,在用移动设备存储和处理素材时,不需要连接遥控器,通过Wi-Fi 6协议就能更快速地将Mavic 3上的素材下载到手机上,快捷方便。
实验室设备使用手册